|
In this issue... |
The Newsletter of a Medical
|
| Laparoscopy refers to visual inspection and surgery within the abdominal cavity with endoscopic tools. It means shorter recovery time, less infection risk, less pain and trauma for the patient, and reduced hospital costs. This rapidly growing field relies on video feedback and relatively primitive surgical instruments inserted through small incisions. The group is developing robotic assisting devices which help guide surgeons during both the training phase and the actual operation. These systems can also be used in a wide range of minimally invasive surgeries. |
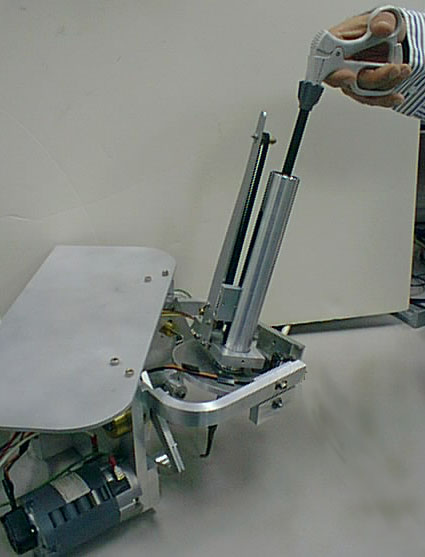
LaparoRobot
We conducted an experiment to determine how the location of the image display influences task performance in endoscopic surgery. Subjects performed two tasks under two display conditions. The endoscopic camera view of the workspace was displayed either on a monitor in front of the subject or projected directly above the workspace. Timing results revealed significant order by display interactions. Overall, subjects performed faster at both pointing and grasping tasks with the superimposed display. In addition, the superimposed display improved the subject's calibration of the workspace with the display space. However, a post-test questionnaire revealed that the image quality was perceived to be superior on the monitor. A second experiment is in progress using virtual reality technology where the superimposed display will have a high image quality. We expect to find that subjects will show very efficient performance with the high resolution, superimposed display. Thanks to Karl-Storz Endoscopy for the use of their first-generation ViewSite equipment to evaluate the superimposed display.
|
|
Personnel
Shahram Payandeh ,
Ash Parameswaran, (PI)
John Dill, (PI)
Christine MacKenzie, (PI)
|
Collaborators
Dr. Javad Dragahi,
Dr. A. Lomax, MD,
Dr. L. Turner, MD,
H. Van Der Wal,
|
|
|
Students and Research Assistants:
Caroline Cao, M.A.Sc. (1996) X. Fang, R.A. (1996)
Ali Faraz, Ph.D. (1998)
William Li, B.A.Sc. (1997)
Jennifer Ibbotson, B.A.Sc. (1999)
Regan Mandryk, M.A.Sc. candidate
Temei Li, Ph.D. candidate
|
Kaari Koehu, B.A.Sc. (1995) Manish Mehta, M.A.Sc. (1996)
Andon Salvarinov, M.A.Sc. (1999)
Drew MacDonald, B.A.Sc. candidate
Zhu Liang Cai, M.A.Sc. candidate
|