|
In this issue... |
The Newsletter of a Medical
|
| Laparoscopy refers to visual inspection and surgery within the abdominal cavity with endoscopic tools. It means shorter recovery time, less infection risk, less pain and trauma for the patient, and reduced hospital costs. This rapidly growing field relies on video feedback and relatively primitive surgical instruments inserted through small incisions. The group is developing robotic assisting devices which help guide surgeons during both the training phase and the actual operation. These systems can also be used in a wide range of minimally invasive surgeries. |
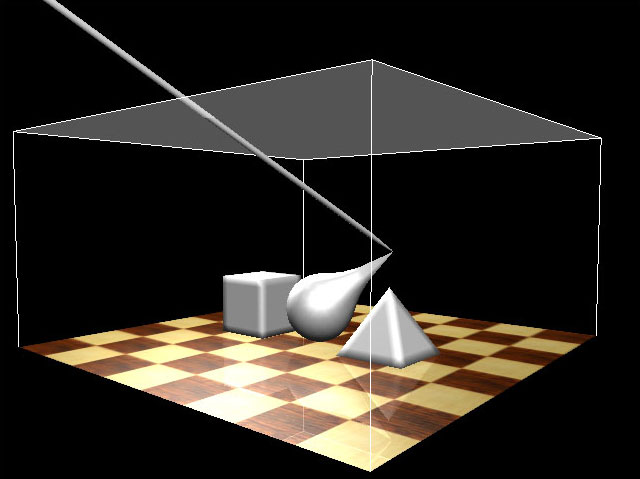
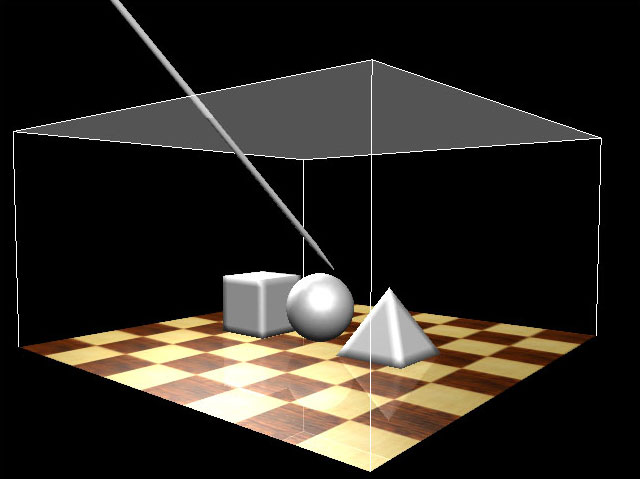
Image Tracking System
Laparoscopic Training Environment
|
|
Personnel
Shahram Payandeh ,
Ash Parameswaran, (PI)
John Dill, (PI)
Christine MacKenzie, (PI)
|
Collaborators
Dr. Javad Dragahi, (1998,99)
Dr. A. Lomax, MD,
Dr. L. Turner, MD,
H. Van Der Wal,
John Meyer,
|
|
|
Students and Research Assistants:
Caroline Cao, M.A.Sc. (1996) X. Fang, R.A. (1996)
Ali Faraz, Ph.D. (1998)
William Li, B.A.Sc. (1997)
Jennifer Ibbotson, B.A.Sc. (1999)
Regan Mandryk, M.A.Sc. (2000)
Temei Li, Ph.D. candidate
Aaron Li, B.A.Sc. candidate
Matt Leduc, B.A.Sc. candidate
|
Kaari Koehu, B.A.Sc. (1995) Manish Mehta, M.A.Sc. (1996)
Andon Salvarinov, M.A.Sc. (1999)
Drew MacDonald, B.A.Sc. candidate
Zhu Liang Cai, M.A.Sc. (2000)
Jason Roth, B.A.Sc. candidate
Xiaoli Zhang, M.A.Sc. candidate
Tissa Mirfakhrai, M.A.Sc. candidate
|